▍ 泊车辅助
▍ 驻车雷达系统
驻车雷达系统是车辆的安全辅助装置,以警示音告知驾驶员车辆前后部障碍物的情况,帮助驾驶员判断前后方障碍物的距离,提高驻车安全。
▍ 前驻车雷达
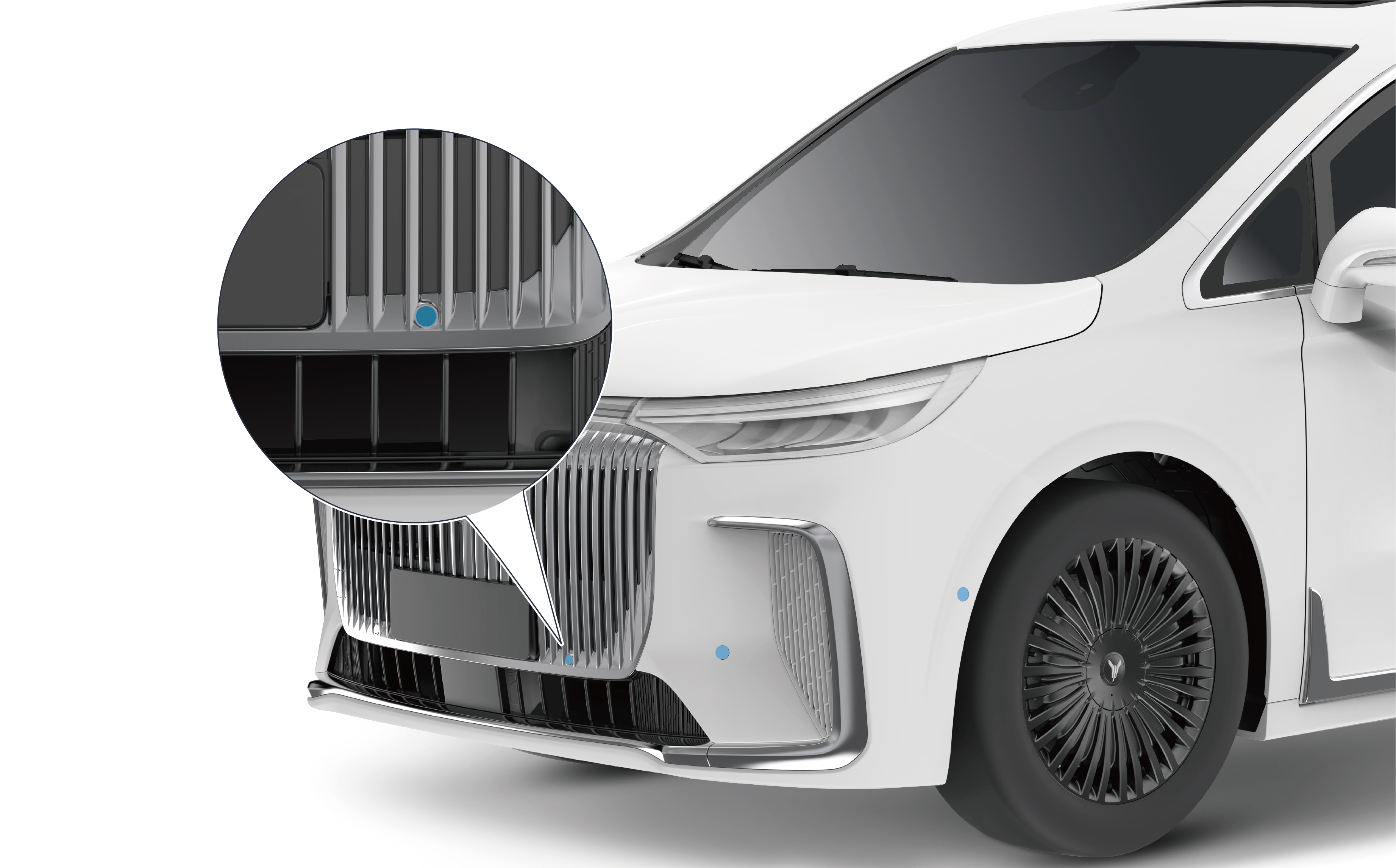
前驻车雷达安装在车辆前保险杠上(共 6 个)。
▍ 后驻车雷达
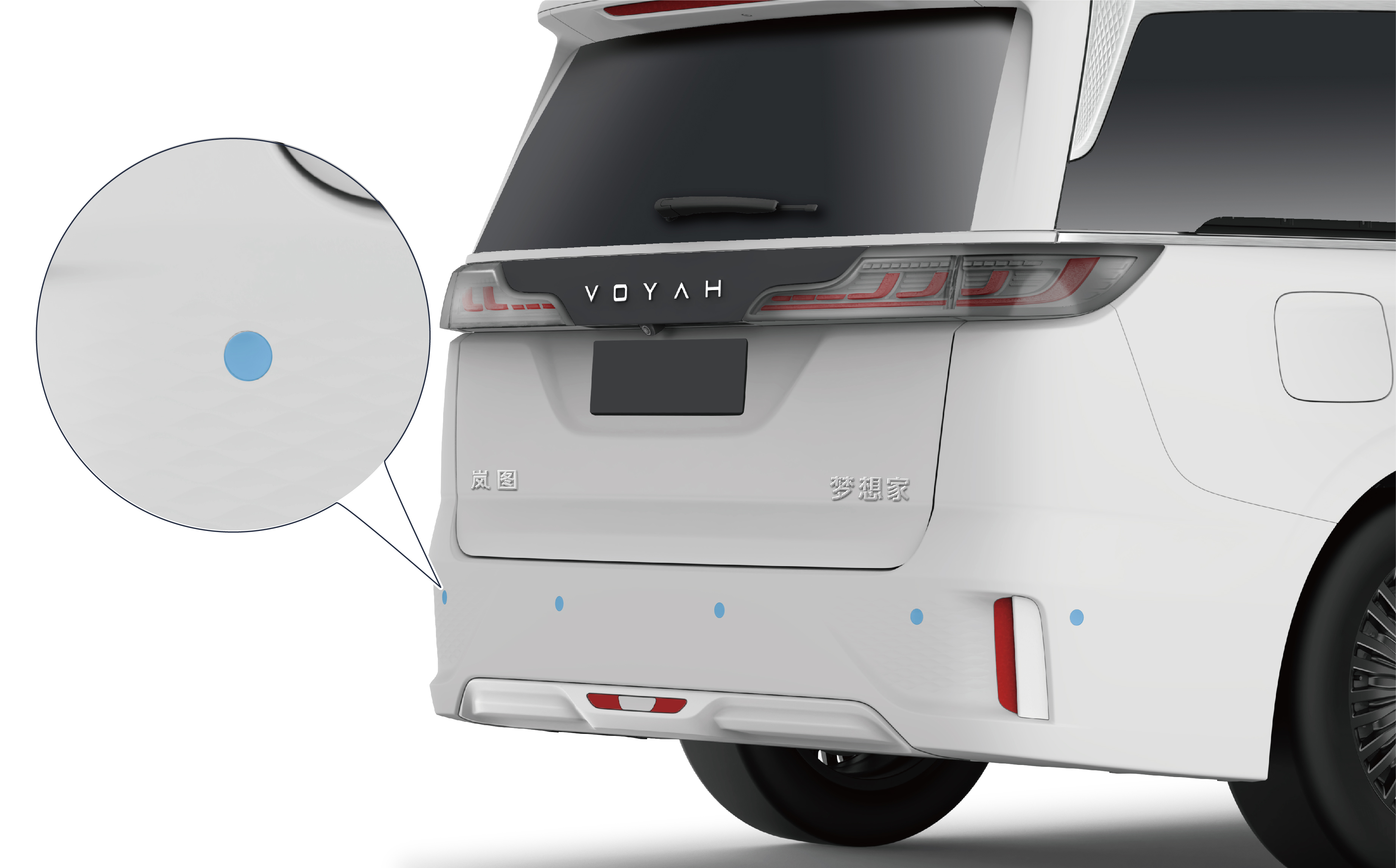
后驻车雷达安装在车辆后保险杠上(共 6 个)。
▍ 侧边距离报警
侧边距离报警是驻车雷达系统的拓展功能,当驻车雷达系统检测到障碍物,且随着车辆运动障碍物进入到车辆侧边盲区 0 厘米 ~ 40 厘米时,系统会提示障碍物位置,引起驾驶员注意。
- 侧边距离报警根据障碍物是否在车辆行驶轨迹上来判断是否发出声音报警,只有当障碍物处于车辆行驶轨迹上时才会发出声音报警提示。
▍ 雷达报警范围
前驻车雷达的最远报警范围为 100 厘米,后驻车雷达的最远报警范围为 150 厘米,侧边距离的最远报警范围为 40 厘米。
不同障碍物距离雷达报警方式如下表所示:
| 类别 | 前雷达 | 后雷达 | 显示颜色 | 提示音 |
|---|---|---|---|---|
| 报警范围 | / | 100 ~ 150厘米 | 绿色 | 每秒 1 次 |
| 60 ~ 100厘米 | 60 ~ 100厘米 | 黄色 | 每秒 2 次 | |
| 30 ~ 60厘米 | 30 ~ 60厘米 | 橙色 | 每秒 4 次 | |
| 0 ~ 30厘米 | 0 ~ 30厘米 | 红色 | 长鸣 |
▍ 雷达静音
- 当挡位处于 D / N 挡,且车辆静止时间达到 2 秒以上时,前雷达系统自动静音。
- 在 360° 全景影像视图界面,点触雷达静音按键可开启 / 取消雷达静音。
- 挡位切入 P 挡后,驻车雷达系统不工作。
- 挡位切入 R 挡后,雷达报警音强制开启。
- 距离保险杠 25 厘米内的区域属于雷达系统盲区,位于该区域的物体可能无法被检测到。
- 侧边距离报警功能无法判断障碍物是否处于移动状态,对于已离开的障碍物,在进入侧边盲区后,系统可能仍会提示其原探测位置。
- 下列情况下(包括但不限于),驻车雷达系统可能无法探测到障碍物或者探测不稳定:
-高度低于驻车雷达探头 5 厘米 ~ 10 厘米的物体。
-铁丝、缆绳等网状物体。
-底盘较高的车辆,如渣土车等。
-车辆前、后部存在的沟坎。
-松软的雪、棉、海绵等容易吸收超声波的物体。
-运动的物体。 - 车辆在过凹凸不平的路面、草地时可能会产生一定的误报现象,驾驶员可以借助 360° 环视系统判断是否可以通过障碍物。
- 雷达系统受周围环境中各类声波,电磁波的干扰可能会出现误报的现象。
- 前后保险杠表面脏污、被遮挡、被磕碰或破损,会影响驻车雷达对周边环境的探测,请及时处理。
- 如需安装车衣,请对上图雷达传感器位置进行破孔操作,使传感器完全露出,确保孔洞周围车衣平整无毛刺,避免遮挡雷达传感器而影响车辆探测精度。为避免车辆划伤,请联系岚图汽车服务中心进行专业操作。
- 驾驶员始终有责任对车辆周围进行检查。
▍ 低速紧急制动(MEB)

低速紧急制动系统(MEB)通过超声波雷达,监测自车与行驶方向上的车辆或行人的距离和相对速度,评估低速行驶时发生碰撞的可能性。当出现碰撞风险时,MEB 自动介入并进行制动,避免发生碰撞事故。若碰撞不可避免,MEB 仍然会尽可能降低车速,减小碰撞造成的伤害。
▍ 开启 / 关闭低速紧急制动功能
可在中控屏设置  驾驶辅助界面,设置开启 / 关闭 MEB 功能。车辆重新上电后,系统会记忆上一次功能设置状态。
驾驶辅助界面,设置开启 / 关闭 MEB 功能。车辆重新上电后,系统会记忆上一次功能设置状态。
▍ 低速紧急制动工作车速
MEB 在 R 挡时工作车速为 2 km/h ~ 7 km/h ,在 N 挡时工作车速为 0 km/h ~ 7 km/h ,车辆前后溜车都可以进行制动以帮助驾驶员降低溜车时的碰撞风险。当车辆处于 D 挡且车辆处于前进状态时,MEB 不工作。
- MEB 属于安全驾驶辅助功能,正常行驶时建议您开启此功能。
- 具有一定高度的杂草可能会触发 MEB,如遇此种情况可暂时关闭MEB。
- 使用轨道式自动洗车机洗车时,请关闭 MEB 功能,避免造成车辆损坏。
- 车辆倒车时,如果后方有地锁、限位杆、轮挡、凹凸不平的路面或 15 厘米以上的路沿等障碍物,可能会触发 MEB。
- 恶劣天气(如雨、雪等),MEB可能会被误触发。
- 对于细小障碍物(如铁丝网、绳状物体等)或容易吸收超声波的物体(如雪,泡棉,羽绒服等),因雷达的局限性 MEB 可能无法触发。
- MEB 功能激活的时间间隔为 30 秒,激活 MEB 功能后,需间隔 30 秒才能再次激活。
- 后保险杠表面脏污、被遮挡、被磕碰或破损,会影响超声波雷达对周边环境的探测,请及时处理。
- MEB 不能代替驾驶员操控车辆,只能辅助驾驶员进行制动。对于某些突发情况可能无法及时判断,驾驶员需时刻观察道路交通状况,始终对安全驾驶负责。
▍ 360°全景影像系统
360°全景影像系统,采用 4 个车外摄像头,对车辆周围环境进行拍摄,并通过中控屏显示,实时为驾驶员提供车辆周围环境信息,辅助驾驶员安全泊车入位或通过复杂路况。
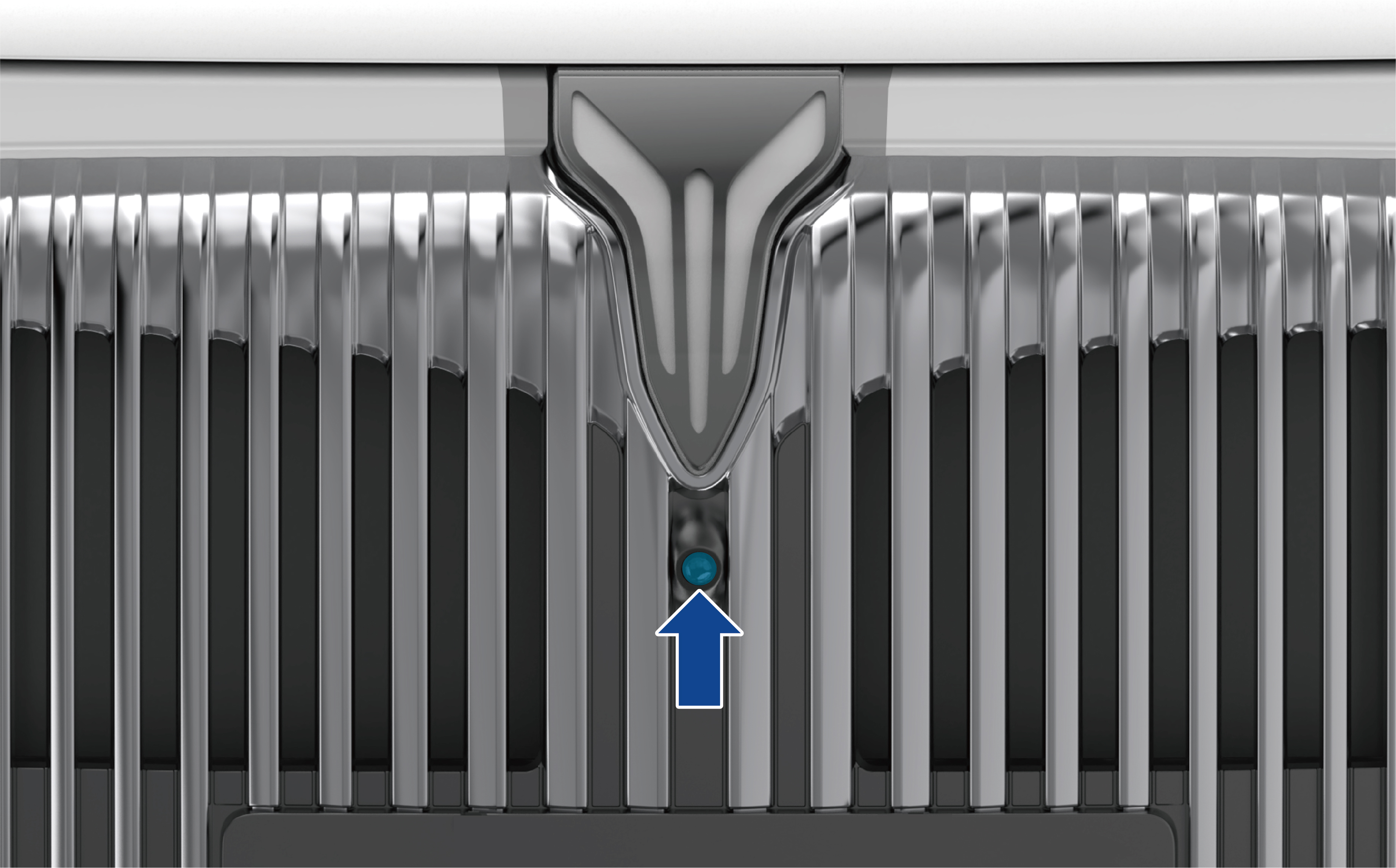
前视摄像头位于前保险杠车标下方,用于摄制车辆前部区域。

后视摄像头位于两个牌照灯之间,用于摄制车辆后部区域。车辆切入 R 挡,画面内会显示倒车动态辅助线。

左、右摄像头位于左、右后视镜外侧底部,用于摄制车辆侧面区域。
- 应始终保持摄像头表面干净。清洁摄像头时,应使用柔软、洁净的干布,避免刮伤摄像头。
- 摄像头存在一定盲区,驾驶车辆或泊车时,必须注意车辆周围环境。
▍ 开启 360°全景影像系统
车辆上电后:
- 在中控屏全应用界面,点触泊车辅助图标开启。
- 在中控屏底部导航栏,点触 360° 全景影像按键开启。
- 挡位切入 R 挡,系统开启。
- 挡位处于非 R 挡位且车速低于 25 km/h,按压方向盘
 按键开启。
按键开启。 - 转向触发影像设置项为开启状态,车速低于设置的速度时,且驾驶员打开转向灯时,系统会开启 360°影像。
- 挡位处于 D 挡或 N 挡且车速低于 15 km/h,雷达探测到障碍物激活雷达告警时,系统会触发 360°全景影像浮窗。
- 可在 360°全景影像界面,点触设置
 图标,设置开启 / 关闭转向触发影像功能。功能开启后,可选择浮窗或全屏显示,设置转向触发影像功能的激活速度。车辆重新上电后,系统会记忆上一次功能设置状态。
图标,设置开启 / 关闭转向触发影像功能。功能开启后,可选择浮窗或全屏显示,设置转向触发影像功能的激活速度。车辆重新上电后,系统会记忆上一次功能设置状态。 - 全景影像浮窗支持左右拖动,以免遮挡中控屏幕上的关键信息,点触浮窗可切换至全屏显示。
- 通过 360°全景影像按键、切入 R 挡或语音唤醒方式触发的全景影像为全屏显示。
▍ 关闭 360° 全景影像系统
360°全景影像系统开启后:
- 挡位切入 P 挡,系统关闭。
- 挡位处于非 R 挡时,车速高于 30 km/h,系统关闭。
- 挡位处于非 R 挡时,按压方向盘 按键或点触中控屏底部导航栏 360° 全景影像按键关闭。
▍ 尾门开启空间提醒
尾门开启空间提醒功能默认开启,系统监测车辆后方与障碍物的距离,在探测到开启尾门空间不足时,360°全景影像会进行相应提醒。减少开尾门磕碰的风险,提升泊车效率。由于泊车传感器探测有一定的局限性,在系统检测到低矮等障碍物时,可能会提醒,但实际开启尾门时无碰撞风险。该功能仅作为开启尾门时碰撞风险的提示,驾驶员需时刻注意道路环境,始终对安全驾驶负责。
▍ 360° 全景影像系统界面
.faa987b5.jpg)
系统工作后,进入全景影像视图界面,可进行如下操作或查看提示信息:
① 全景影像
② 智能泊车辅助
③ 雷达静音
④ 显示模式切换( 2D / 3D )、两侧及前后左右视图切换
⑤ 设置(可对转向触发浮窗、转向触发激活速度、智能泊车辅助语音播报、车牌号设置)
⑥ 视图切换(点触车模前后左右区域,可切换车辆前后左右视图)
⑦ 屏幕亮度调节(上下滑动屏幕时弹出)
▍ 透明车体
在 360°全景影像系统界面,点触俯视图车模区域,可开启 / 关闭透明车体功能。

- 360° 全景影像系统开启时,中控屏会显示车辆周围拍摄的画面,并显示相应辅助线。
- 360° 全景影像系统摄像头表面脏污、被遮挡、被磕碰或破损,会影响车辆周围环境的拍摄,请及时处理。
- 360° 全景影像系统不能代替驾驶员对车辆周围环境的安全确认,只能辅助驾驶员对车辆周围环境观察,驾驶员需时刻注意道路环境,始终对安全驾驶负责。
▍ 智能泊车辅助
智能泊车辅助系统采用视觉和超声波融合的方式识别停车位以及障碍物的信息。系统对识别到的环境数据进行处理并规划到目标停车位的泊车路径,控制车辆进行前进、后退、转向、刹车等操作,将车辆泊入 / 泊出停车位。
- 智能泊车辅助可识别地面划线车位,包括标准的水平线车位、垂直线车位、斜列线车位;也可识别空间车位,例如两辆车中间的可供泊车的车位,包括水平空间车位、垂直空间车位。
▍ 开启 / 关闭智能泊车辅助
▍ 开启智能泊车辅助
- 在中控屏全应用 泊车辅助界面,点触智能泊车辅助,开启智能泊车辅助功能。
- 车速低于 25km/h 时,驾驶员说“Hi 岚图,开启智能泊车辅助 / 打开智能泊车辅助”,开启 APA 功能。
▍ 关闭智能泊车辅助
- 在智能泊车辅助界面,点触返回按键,关闭 APA 功能。
- 在智能泊车辅助界面,驾驶员说“Hi 岚图,关闭智能泊车辅助”,关闭智能泊车辅助功能。
▍ 车位搜索
满足下列条件,智能泊车辅助会搜索泊车位:
- 车速低于 15 km/h。
- 车辆与目标停车位的距离保持在 0.5 米 ~ 1.5 米之间。
- 车辆处于 D 挡或 R 挡。
- 搜索车位时,车辆前进方向尽量与目标车位泊入边线平齐。
- 所有车门和电动尾门均关闭。
▍ 泊入 / 泊出
▍ 泊入
在泊车辅助模式选择界面,点触“泊入”按键;或在该界面时,驾驶员控制车辆直行,当速度大于 1 km/h 时,系统将进入泊入模式,开始搜索车位。当驾驶员确认需泊入的车位后,在中控屏上点触“开始泊车”按键,系统会规划车辆行驶轨迹,并控制车辆使车辆泊入停车位。
▍ 泊出
在泊车辅助模式选择界面,点触“泊出”按键。通过点触中控屏上选项的方式选择泊出方向后,点触“开始泊车”按键,系统会规划车辆行驶轨迹,并控制车辆使车辆泊出。
▍ 无感泊出
使用 APA 功能完成泊入后,下一次点触(车辆未移动)“泊出”时系统将进入无感泊出状态,即系统推荐泊出方向(水平车位根据泊入时的方向推荐水平向左或向右泊出,垂直车位垂直向前泊出)进入泊车辅助就绪界面,点触 “开始泊车” 即可完成智能泊车辅助,以提供更加便捷贴心的泊车体验。如需切换其他方向,可先退出应用或移动车辆,然后选择需求的泊车方向。
▍ 泊车辅助暂停
智能泊车辅助过程中,以下情况将导致泊车辅助暂停:
- 打开任一车门。
- 打开前机舱罩。
- 打开电动尾门。
- 打开加油盖。
- 打开充电盖。
- 检测到泊车路径上有障碍物。
- 点触暂停按键。
如需恢复泊车进程,请按照中控屏上提示操作。
▍ 泊车辅助退出
智能泊车辅助过程中,以下情况将导致泊车辅助退出:
- 踩下加速踏板。
- 启用 EPB。
- 转动方向盘。
- 操作换挡手柄。
- 泊车路面坡度过大。
- 系统或关联系统故障。
- 目标车位附近存在障碍物,导致无法规划泊车路径的情况。
- 车位过小,泊车空间不足。
- 泊车路径上有较高路沿、减速带,或存在有高度差的路面,出于安全因素考虑,可能无法越过。
- 车辆停车附近存在如方柱、入侵到行驶方向的灌木丛等,导致空间或车位受限的情况。
- 车辆四轮同时被沟槽、减速带等其它障碍物卡住。
▍ 泊车辅助完成
泊车辅助完成时,中控屏上显示泊车辅助完成,请确认挡位已切入 P 挡且电子驻车制动已启用后,再进行开启车门及车辆锁止下电操作。
- 以下情况(包括但不限于)可能导致雷达和摄像头监测受限,智能泊车辅助功能无法正常工作:
- 雷达或摄像头表面脏污、破损、错位或被遮挡(如污泥或者冰雪)。
- 恶劣天气(如光线不足、雾、霾、雨、大雪、冰雹等)。
- 周围环境温度过高或过低时。
- 停车线被遮挡、不清晰、磨损、缺失等。
- 受到其他电器设备或装置的干扰。
- 车辆在泊车辅助功能使用过程中,因外界因素导致的后视镜折叠 ( 如人为强行干预折叠或展开后视镜 )。 - 以下情况(包括但不限于)可能导致搜索车位过程中出现车位误释放,请驾驶员根据实际场景判断,不要激活智能泊车辅助功能:
- 离划线车位较远(超过 1.5 米),导致车位内有车的情况下,出现误释放车位的情况。
- 搜索车位时车速过高,请尽量将车速保持在 10 km/h 以下。
- 停车位内有水坑、洼洞等特殊车位。
- 停车位前或内部有锥筒、警示牌、细杆、低矮圆柱等障碍物。
- 停车位前或内部有吸收超声波材质的障碍物(如棉服等)。
- 停车位止轮器方向与车辆前进方向一致的反向止轮器 ( 止轮器在车辆前方 )。 - 以下情况(包括但不限于)可能导致智能泊车辅助过程中出现急刹,甚至导致出现擦碰等安全风险,请驾驶员保持警惕,随时控制车辆:
- 目标停车位内或附近有地锁、轮挡、带直角的方柱或路面有坑、不平整。
- 泊车周围有使用相同频率超声波探头的车辆或有移动物体(如车辆、 行人等)干预泊车。 - 以下情况(包括但不限于)可能导致泊车无法按预期的方式运行,甚至产生车辆碰撞风险,请勿使用智能泊车辅助:
- 车辆安装有拖车、雪地防滑链、使用备胎或非原装轮胎、胎压过低时。
- 装载物超出自车车身尺寸范围时。
- 目标停车位狭窄或立体停车位。
- 目标停车位附近有细、尖、矮、悬空的物体,如非标准止轮器 ( 如石 墩类型)、低矮圆柱、细杆、消防栓等。
- 目标停车位附近存在减速带、台阶、有高度差路面。
- 目标停车位附近有沟渠、悬崖、水池等。
- 天气恶劣,有中到大雪、路面存在积雪、中到大雨、路面存在积水等 情况,系统可能无法找到车位,或因无法探测到障碍物导致安全风险。
- 坡道、车位狭窄的停车位。
- 目标停车位紧靠路边的栅栏、墙面、路灯、树木、灌木丛、柱子时。
- 目标停车位附近有客车、货车、卡车、自行车、三轮车或其他特殊车 辆时。 - 如需安装车衣,请对泊车感器位置进行破孔操作,使传感器完全露出,确保孔洞周围车衣平整无毛刺,避免遮挡泊车传感器而影响车辆探测精度。
- 智能泊车辅助不能完全代替驾驶员操控车辆,只能辅助驾驶员停车,驾驶员需要对车辆及人身安全负责。泊车过程中,驾驶员应时刻注意车辆周围环境,否则可能导致安全风险。
▍ 遥控泊车辅助
▍ 遥控泊入
驾驶员确认需泊入的车位后,在中控屏上点触  遥控泊车辅助按键,同时确认挡位切入 P 挡且电子驻车制动已启用。驾驶员下车后通过岚图汽车 APP 激活遥控泊车辅助,系统会规划车辆行驶轨迹,并控制车辆泊入停车位。
遥控泊车辅助按键,同时确认挡位切入 P 挡且电子驻车制动已启用。驾驶员下车后通过岚图汽车 APP 激活遥控泊车辅助,系统会规划车辆行驶轨迹,并控制车辆泊入停车位。
▍ 遥控泊出
车辆未上电,驾驶员通过岚图汽车 APP 在车外启动车辆。在 APP 界面点触泊出,并选择泊出方向后,可激活遥控泊车辅助功能,系统会规划车辆行驶轨迹,并控制车辆使车辆泊出。
- 以下情况(包括但不限于)可能导致雷达和摄像头监测受限,遥控泊车辅助功能无法正常工作:
- 雷达或摄像头表面脏污、破损、错位或被遮挡(如污泥或者冰雪)。
- 恶劣天气(如光线不足、雾、霾、雨、大雪、冰雹等)。
- 周围环境温度过高或过低时。
- 停车线被遮挡、不清晰、磨损、缺失等。
- 受到其他电器设备或装置的干扰。
- 车辆在泊车辅助功能使用过程中,因外界因素导致的后视镜折叠 ( 如 人为强行干预折叠或展开后视镜 )。 - 以下情况(包括但不限于)可能导致遥控泊车辅助过程中出现急刹,甚至导致出现擦碰等安全风险,请驾驶员保持警惕,随时控制车辆:
- 目标停车位内或附近有地锁、轮挡、带直角的方柱或路面有坑、不平整。
- 泊车周围有使用相同频率超声波探头的车辆或有移动物体(如车辆、 行人等)干预泊车。 - 以下情况(包括但不限于)可能导致泊车无法按预期的方式运行,甚至
产生车辆碰撞风险,请勿使用遥控泊车辅助:
- 车辆安装有拖车、雪地防滑链、使用备胎或非原装轮胎、胎压过低时。
- 装载物超出自车车身尺寸范围时。
- 目标停车位狭窄或立体停车位。
- 目标停车位附近有细、尖、矮、悬空的物体,如非标准止轮器 ( 如石 墩类型)、低矮圆柱、细杆、消防栓等。
- 目标停车位附近存在减速带、台阶、有高度差路面。
- 目标停车位附近有沟渠、悬崖、水池等。
- 天气恶劣,有中到大雪、路面存在积雪、中到大雨、路面存在积水等 情况,系统可能无法找到车位,或因无法探测到障碍物导致安全风险。
- 坡道、车位狭窄的停车位。
- 目标停车位紧靠路边的栅栏、墙面、路灯、树木、灌木丛、柱子时。
- 目标停车位附近有客车、货车、卡车、自行车、三轮车或其他特殊车辆时。 - 遥控泊车辅助过程中,若驾驶员距车辆过远,手机与车辆蓝牙连接断开,泊车辅助将暂停。
- 若岚图汽车 APP 泊车界面转为后台运行,或手机出现锁屏 / 熄屏 / 来电等其他干扰现象,遥控泊车辅助进程将暂停。
- 使用遥控泊车辅助时,请保持手机电量充足,尽量关闭手机后台运行程 序,以免造成手机卡顿,从而无法及时控制车辆,导致出现安全风险。
- 遥控泊车辅助过程中,驾驶员需时刻观察车辆周边环境,如发现碰撞风险,应及时通过岚图汽车 APP 暂停后上车控制车辆。
- 如岚图汽车 APP 出现异常退出,驾驶员需尽快上车控制车辆。
- 遥控泊车辅助不能完全代替驾驶员操控车辆,只能辅助驾驶员停车,驾驶员需要对车辆及人身安全负责。泊车过程中,驾驶员应时刻注意车辆周围环境,否则可能导致安全风险。
▍ 遥控直行辅助
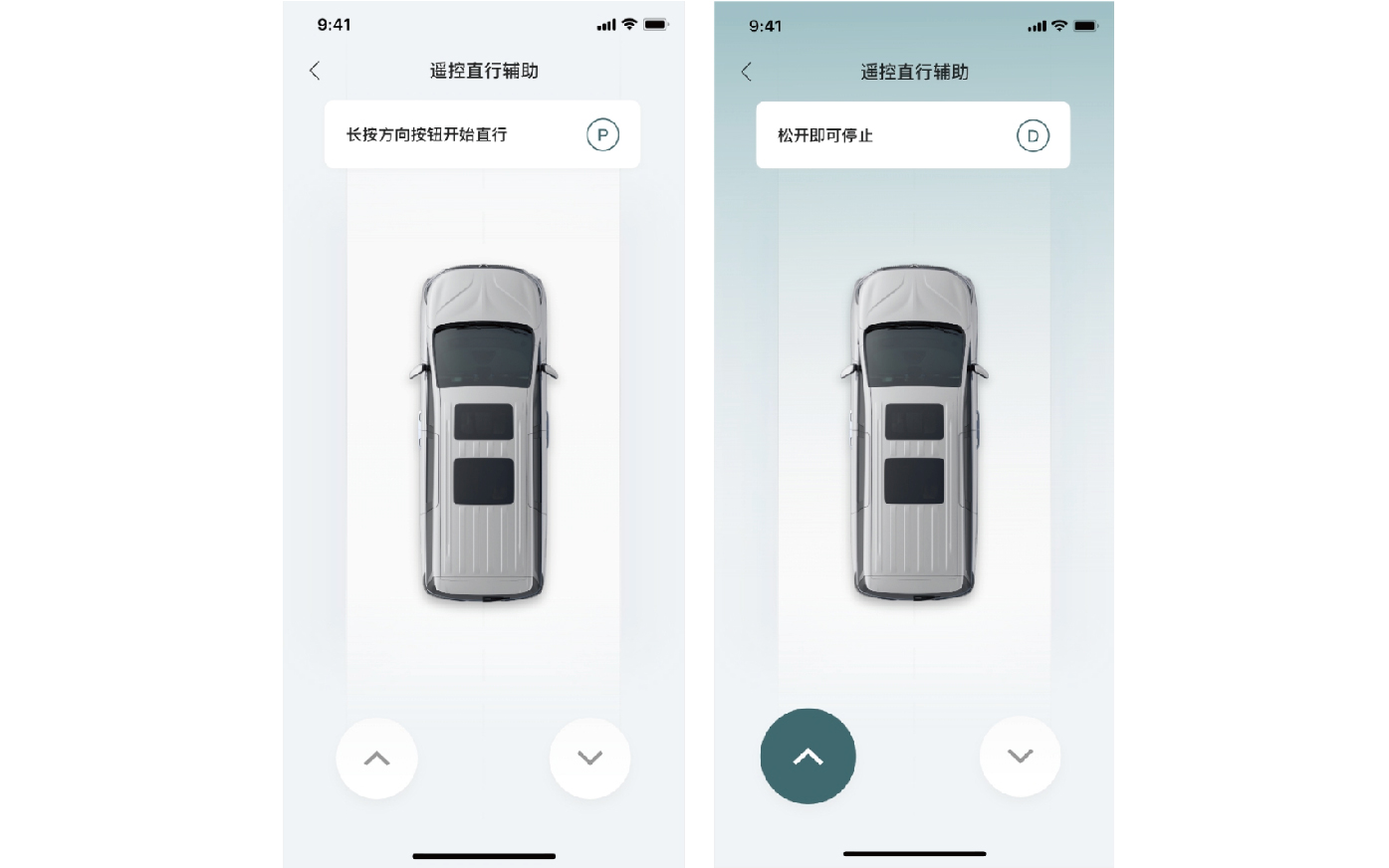
当需要控制车辆直行时,驾驶员无需上车启动车辆,通过手机岚图汽车 APP “遥控直行辅助”功能,远程操控车辆实现直线前进或后退,轻松解决狭窄车位等复杂场景下的泊车难题,提升操作便利性与灵活性。
使用遥控直行辅助功能前,请确保车辆所有车门、前机舱盖、后备箱均已关闭,车辆静止且未处于充电或 OTA 等特殊状态。
▍ 功能使用
驾驶员检查确认泊车环境安全适宜。
完成手机与车辆的蓝牙连接。
a.进入手机设置页面,打开“蓝牙”。
b.登录手机岚图汽车 APP。
c.打开岚图汽车应用,在“岚图”页面,点触“蓝牙钥匙”连接蓝牙。
在岚图汽车 APP “岚图”页面,点触“遥控直行辅助”,待系统完成自检后,长按前进或后退键遥控车辆直行前进或后退,松开按键车辆停止运动。
遥控直行辅助过程中,如探测到车辆前方或后方存在障碍物,系统将在通过岚图汽车 APP 发出相应提示,请驾驶员及时检查车辆周围环境,确认安全后,再继续进行遥控操作。
- 以下情况(包括但不限于)可能导致雷达和摄像头监测受限,遥控直行辅助功能无法正常工作:
- 雷达或摄像头表面脏污、破损、错位或被遮挡(如污泥、冰雪等)。
- 恶劣天气(如光线不足、雾、霾、雨、大雪、冰雹等)。
- 周围环境温度过高或过低时。
- 受到其他电器设备或装置的干扰。
- 车辆在泊车辅助功能使用过程中,因外界因素导致的后视镜展开 (如 人为强行干预折叠或展开后视镜 )。 - 以下情况(包括但不限于)可能导致遥控直行辅助过程中出现急刹,甚至导致出现擦碰等安全风险,请驾驶员保持警惕,随时控制车辆:
- 遥控直行路径内有地锁、轮挡、带直角的方柱或路面有坑、不平整。
- 遥控直行路径周围有使用相同频率超声波探头的车辆或有移动物体(如车辆、行人等)干预遥控直行辅助。 - 以下情况(包括但不限于)可能导致功能无法按预期的方式运行,甚至产生车辆碰撞风险,请勿使用遥控直行辅助:
- 车辆安装有拖车、雪地防滑链、使用备胎或非原装轮胎、胎压过低时。
- 装载物超出自车车身尺寸范围时。
- 遥控直行路径附近有细、尖、矮、悬空的物体,如非标准止轮器 (如石墩类型)、低矮圆柱、细杆、消防栓等。
- 遥控直行路径附近存在减速带、台阶、有高度差路面。
- 遥控直行路径附近有沟渠、悬崖、水池等。
- 天气恶劣,有中到大雪、路面存在积雪、中到大雨、路面存在积水等情况,系统可能无法探测到障碍物导致安全风险。
- 遥控直行路径紧靠路边的栅栏、墙面、路灯、树木、灌木丛、柱子时。
- 遥控直行路径附近有客车、货车、卡车、自行车、三轮车或其他特殊车辆时。 - 遥控直行辅助的泊车速度不支持调节。
- 遥控直行辅助每次可行驶的最长距离为 5 米。
- 遥控直行辅助过程中,车辆将自动折叠外后视镜,用车前需手动展开外后视镜。
- 遥控直行辅助过程中,请将手机与车辆始终保持在蓝牙连接范围内(距离车辆 2 ~ 5 米范围内),同时请驾驶员注意不要站在直行路线上;若 驾驶员距车辆过远,手机与车辆蓝牙连接断开,直行辅助将退出。
- 遥控直行辅助过程中,如遇剐蹭或碰撞风险,但手机岚图汽车 APP 运行异常,可通过开启车门暂停辅助功能,暂停后请及时接管车辆。
- 使用遥控直行辅助时,请保持手机电量充足,尽量关闭手机后台运行程序,以免造成手机卡顿,从而无法及时控制车辆,导致出现安全风险。
- 遥控直行辅助结束后,请在确认车辆锁止后离开车辆。
- 如需安装车衣,请对泊车感器位置进行破孔操作,使传感器完全露出,确保孔洞周围车衣平整无毛刺,避免遮挡泊车传感器而影响车辆探测精度。
- 遥控直行辅助过程中,系统不支持主动识别及避让车辆两侧的障碍物,驾驶员须在操作前及过程中全面检查观察周边环境,确保车辆两侧及行驶路径无障碍物且环境安全,始终对车辆及人身安全负责。
▍ 哨兵模式
哨兵模式,也称 “车辆 24 小时监控”。当哨兵模式开关处于开启状态且动力电池电量充足时,车辆锁止后功能自动启用,并通过360°全景影像摄像头和震动传感器实时监控车辆周边环境。当达到触发条件时(如系统检测到有可疑人员或车辆接近、车辆被撞击、发生盗抢等),系统将录制事件记录视频,并在下次用车时提醒车主前往行车记录仪页面查看。
哨兵模式功能开启后,中控屏状态栏  图标点亮,当车辆出现被撞击或疑似盗抢等紧急情况时,哨兵模式功能激活,车辆将开启危险警告灯,鸣响喇叭,并通过岚图汽车 APP 给车主发送提示信息,上传录制视频,便于车主及时确认处理。
图标点亮,当车辆出现被撞击或疑似盗抢等紧急情况时,哨兵模式功能激活,车辆将开启危险警告灯,鸣响喇叭,并通过岚图汽车 APP 给车主发送提示信息,上传录制视频,便于车主及时确认处理。
▍ 开启 / 关闭哨兵模式
- 可在中控屏设置 AI 实验室 智能监测界面,设置开启 / 关闭哨兵模式功能。功能开启后,还可将家、公司或其他常用安全地址设置为不启动,减少电量消耗。车辆重新上电后,系统会记忆上一次功能设置状态。
- 可通过智能语音开启 / 关闭哨兵模式。
- 可在岚图汽车 APP 远程车控界面,开启 / 关闭哨兵模式。
▍ 视频回放
可在中控屏全应用 行车记录仪 哨兵录像界面,查看哨兵模式录制的事件记录视频。
根据人员和车辆的不同风险等级,哨兵录像分为一般录像及紧急录像,其中一般录像用于存储常规视频,分为人员风险低、中、高及车辆风险 4 类;紧急录像用于存储碰撞及盗抢视频。
▍ 功能限制
由于哨兵模式自身的局限性,视频仅做参考,实际事故判断请以道路周边监控摄像头为准。
以下情况(包括但不限于),哨兵模式可能无法录制到有效视频:
- 车环境光线较差 / 摄像头脏污 / 被遮挡时,哨兵模式可能不会触发。
- 当外部环境变化引起车身强烈振动时,哨兵模式可能误触发。
- 停车环境有人员或车辆频繁经过时,哨兵模式可能会多次触发。
- 哨兵模式开启后,部分车辆零部件(如 360°全景影像系统)将持续处于工作。为减少车辆电量损耗、延长零件使用寿命,建议在安全停车环境下,不要长时间开启哨兵模式。
- 哨兵模式仅在动力电池电量高于20%时才能开启,动力电池电量低于15%时,哨兵模式会自动退出。
▍ 云瞰(实况)
车辆处于陌生环境或周围环境不安全时,想查看车辆周围情况或者车辆周围有可疑事件触发手机 APP 哨兵预警后,用户可通过岚图汽车 APP 远程实时查看车辆周围情况,同时在手机上录制和存储车辆周围环境视频以保留证据。
可使用寻车功能触发闪灯及鸣笛操作,警示附近人员或动物。若无法确认车辆停车位置,也可使用云瞰功能查看车辆附近标志建筑物,使用寻车功能辅助寻车。
根据工作情况,云瞰分为以下四个状态:
| 状态名称 | 状态描述 |
|---|---|
| 待启用 | 中控屏云瞰授权开关关闭。 |
| 开启 | 通过中控屏打开云瞰授权开关,但尚未进入远程视频实时查看状态。 |
| 使用中 | 用户离车闭锁后,通过手机岚图汽车 APP 进入云瞰页面实时查看车辆周围状态。 |
| 退出 | 用户退出手机岚图汽车 APP 云瞰页面。 |
▍ 开启/关闭云瞰(实况)
使⽤云瞰功能前,请先在中控屏设置 实验室 车辆监测界⾯,设置开启云瞰(实况)功能。功能开启后,通过岚图汽车 APP 管理中心进⼊云瞰(实况)界面,可实时查看车辆外部环境,支持视角切换,同时可进行拍照、录像、闪灯及鸣笛操作。
- 使用“云瞰”时,系统使用车外摄像头,并通过网络将车辆的周围情况实时脱敏推送到车主手机 APP 中,不会在本地录制视频,也不会在云端存储,只能在手机 APP 端录制视频,保存在手机存储空间中。
- 请用户在遵守当地法律法规和所在场所关于摄像头使用规定的要求的前提下使用“云瞰”,并承担相应的全部责任。
- 请在车辆处于锁车下电状态且电量充足时使用“云瞰”。电量低于 15% 时,只能短暂使用功能,车辆会自动断开视频流传输连接;连续低电量使用“云瞰”会对车辆蓄电池带来一定影响,若无紧急情况,尽量不要在低电量场景下使用该功能。
- 视频流上传使用的是车机流量,车机流量不足时无法使用“云瞰”,还请随时关注车机流量剩余情况。
- 匿名化处理基于AI能力,存在不确定性,受到目标移动速度,摄像头像素,光照条件,遮挡等限制,存在一定概率的错误脱敏和漏脱敏。
- OTA 升级、维修模式等特殊场景下无法使用“云瞰”。
← 驾驶辅助 GPF(颗粒捕集器)再生处理* →